Our recent paper (https://lnkd.in/eYxcHbbE) together with Pascal Brunner, Werner Huber, Martin Margreiter, Klaus Bogenberger and Ronald Kates investigated this question for a right-turning scenario: cars intend to turn right but cyclists have the right of way. Additionaly, parked cars occlude the cycling track.
To answer the above question, we conducted a virtual safety performance assessment. This approach is subject to the V4SAFETY project. More specifically, we employed the methodology of a virtual Randomized Controlled Trial (vRCT). For this purpose, real traffic is represented by simulated traffic and the parameters are varied stochastically in each simulation run. Particular attention was paid to a valid modeling of human cognitive processes that lead to realistic collisions in simulation.
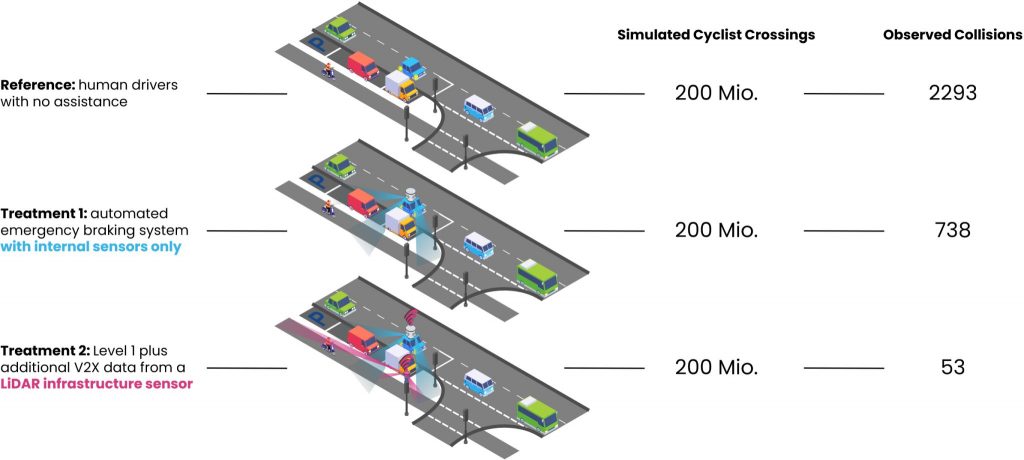
We investigated the difference between:
reference situation (human drivers with no assistance)
treatment option 1 (cars equipped with automated emergency braking system with only internal sensors)
treatment option 2 (treatment option 1 plus additional V2X data from a LiDAR infrastructure sensor)
The simulation results show, that each additional level of information quality in data fusion provids significant contributions to collision avoidance, due to robust environmental detection of potential conflicts.
The present results are intended to provide an illustration of the vRCT method and deliver an estimate of potential rather than a robust quantitative estimate of efficacy. Several of the simplifying assumptions made in the above analysis need to be revisited, especially with respect to human (mis-)behavior. These modeling challenges are subject of our ongoing research.
Stay tuned for our upcoming publications in this area!